
Yiqi Lyu (吕一奇)
Email: yiqi AT u DOT northwestern DOT edu
I am currently a Ph.D. student in Center for Robotics and Biosystems at Northwestern University. Before NU, I work with Wenhao Ding and Ding Zhao as research intern at Safe AI Lab. I received a Master's degree in Mechanical Engineering from Carnegie Mellon University, and a Bachelor's degree in Mechanical Design, Manufacturing, and Automation from Huazhong University of Science and Technology.
Research Interest
My research intersects robotics, control, machine learning, and mechanical engineering, with a goal to bridge the gap between advanced robotics research and practical applications. I believe in a holistic approach to intelligent robotics, which integrates hardware design, control strategies, and decision-making to create comprehensive, efficient robot systems.
I am currently specifically interested in the topics of Vision-language-action models, AI embodiment, multi-modal perception.
News & Updates
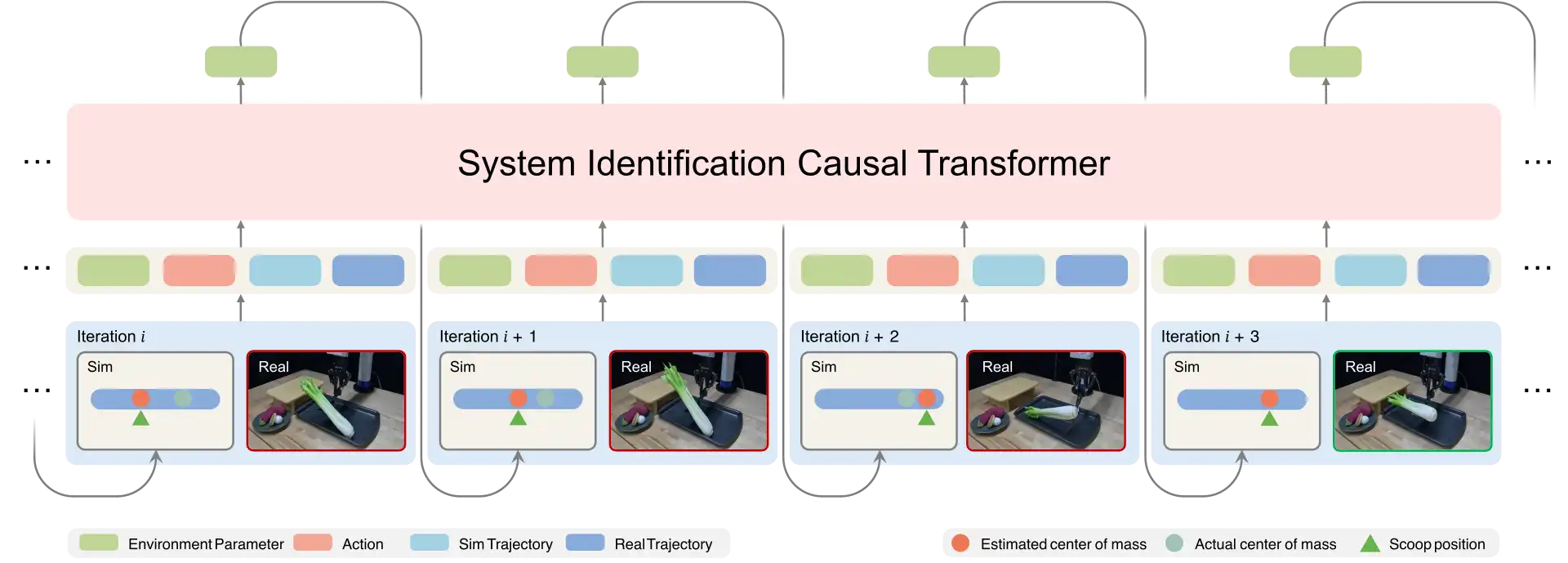
2025/01 - Our paper about In-Context Learning for Sim-to-Real System Identifications got accepted by IEEE Robotics and Automation Letters (RA-L), 2025.
2024/09 - I will start my Ph.D. journey at Center for Robotics and Biosystems at Northwestern University.
2023/06 - I will join Safe AI Lab as a research intern. 2023/05 - I graduate from master's program at Carnegie Mellon Univerisy.
Publications
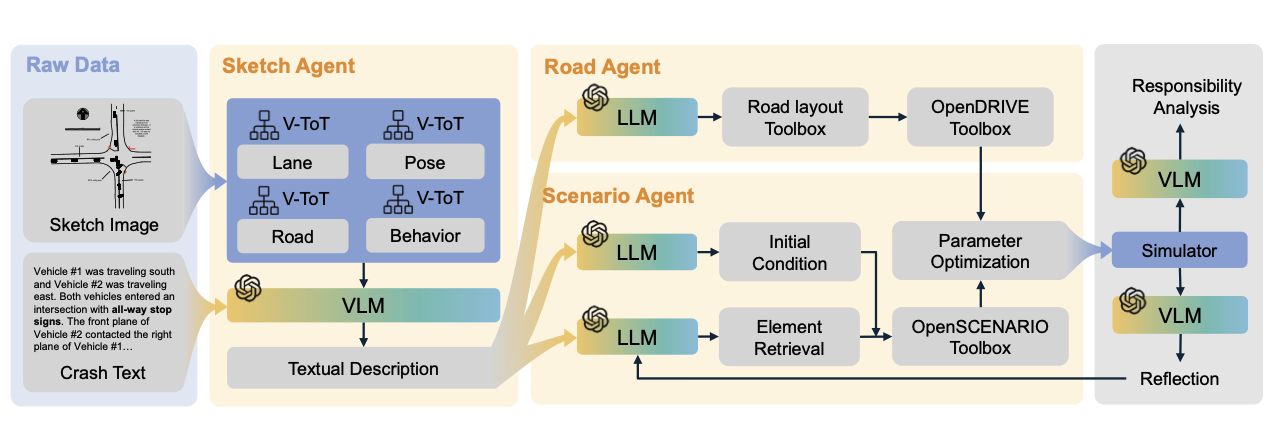
CrashAgent: Crash Scenario Generation via Multi-modal Reasoning
Miao Li, Wenhao Ding, Haohong Lin, Yiqi Lyu, Yihang Yao, Yuyou Zhang, Ding Zhao
Under submission
Selected Projects
Skill-based Imitation Learning for Robotic Arm Manupulation in Dynamic Engironments
Objective: The goal of this project is to create a generalizable robotic arm manipulation system capable of operating in dynamic environments involving human interactions.
Key words: Generalizable Policy, Data-driven, Imitation Learning, Energy Function, RRT, A*, Real-world Deployment
Generalizable Beam Walking for Legged Robots with Reinforcement Learning
Objective: developing a learning-based framework for quadruped robot beam walking.
Key words: Quadruped Robot, Agile Locomotion, Curriculum Learning, Visuomotor Control, Gaussian Splatting
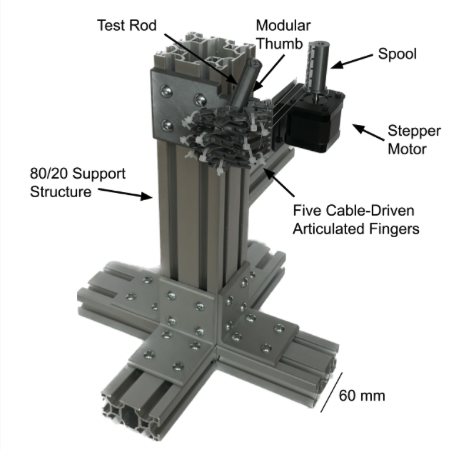
The Phylogenetic Origin of the Red Panda's False Thumb as an Adaptation to Arboreal Locomotion
A modular, bio-inspired red panda paw is designed and fabricated with which to experimentally investigate the evolutionary reason for the existence of the false thumbs of red pandas.
Key words: Bio-inpsired Robot, CAD, FEA, Mechatronics, Actuators and Control, Arduino

Dynamic Balance and Stability in Tumbler Robotics
The objective of this project is to ensure the stability of a tumbler robot, maintaining its upright position during various maneuvers including standing, moving, and turning. To elevate the complexity and intrigue of the project, an additional pendulum is affixed to the top of the robot. This pendulum must be kept stable even as the robot is in motion.
Key words: MPC, Minimun-jerk Trajectory, Input Shaping, MATLAB, Simulink